
This time, I will explain the process from downloading Betaflight to setup.
There are some differences in how to use it depending on the version, but the idea will be the same, so I think that you can go from download to setting by referring to this article.
[Betaflight setting manual] explanation of how to use from the download
What is BetaFlight?
Betaflight is a flight controller software (firmware) used to fly multi-rotor aircraft (so-called drones) and fixed-wing aircraft.It focuses on flight performance, state-of-the-art feature additions, and a wide range of target support.
In addition to Betaflight, there are Baseflight, Cleanflight, Emuflight, and so on, but Betaflight is now the mainstream.
There is a more detailed explanation on Betaflight's official website, so if you are interested, please read it.
Reference Betaflight Official Site
Betaflight Download
In order to use Betaflight, you need to download the software (Betaflight Configurator) and install it on your PC, and the latest version is available from the following site (GitHub) below.
Please note that at the time of writing the article, it is necessary to change the software used by the firmware version installed on the drone's flight controller.
- Betaflight less than 4.0: Betaflight Configretor 10.4
- Betaflight 4.0 and above: Betaflight Configretor 10.6 or later
Install Betaflight
For how to install from the download of Betaflight to the PC, please wait for a while because I will summarize it in a separate article.
How to start Betaflight
Double-click the application (software) installed on your PC to start it.

Connect the PC and the drone with a USB cable and select "Connect".Now you can set up the drone flight controller.
Basic how to set up Betaflight
BetaFlight has some settings.It is characteristic that there is no change in the basic configuration even if each item is upgraded.
This article explains the characteristics of each item.
In addition, this article will be based on "Betaflight 10.4".
Betaflight Settings
Betaflight consists of a total of 11 items.In addition, the setting item increases because it is possible to set more detailed in Expert mode, but there is no problem even if it is not usually used.
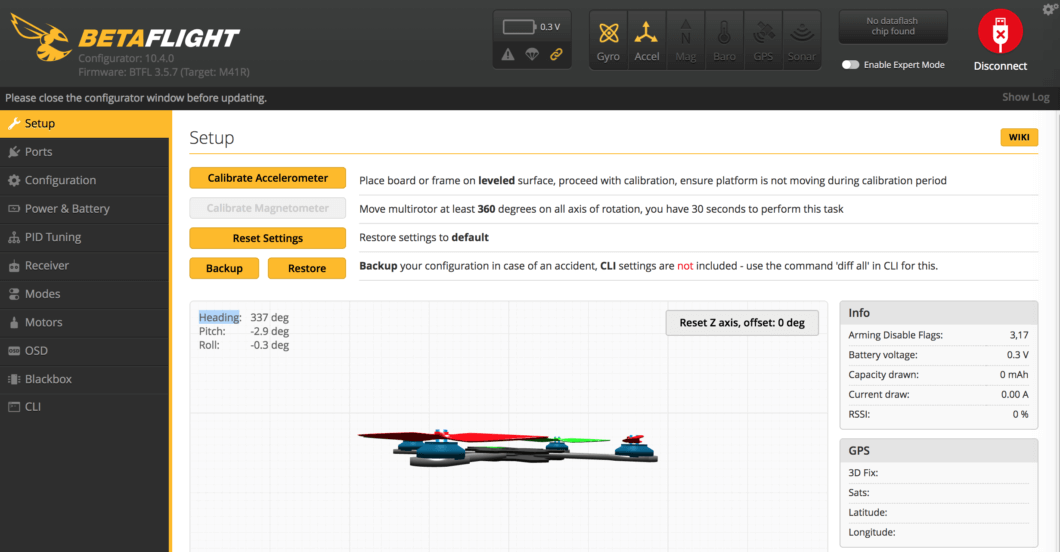
Setup
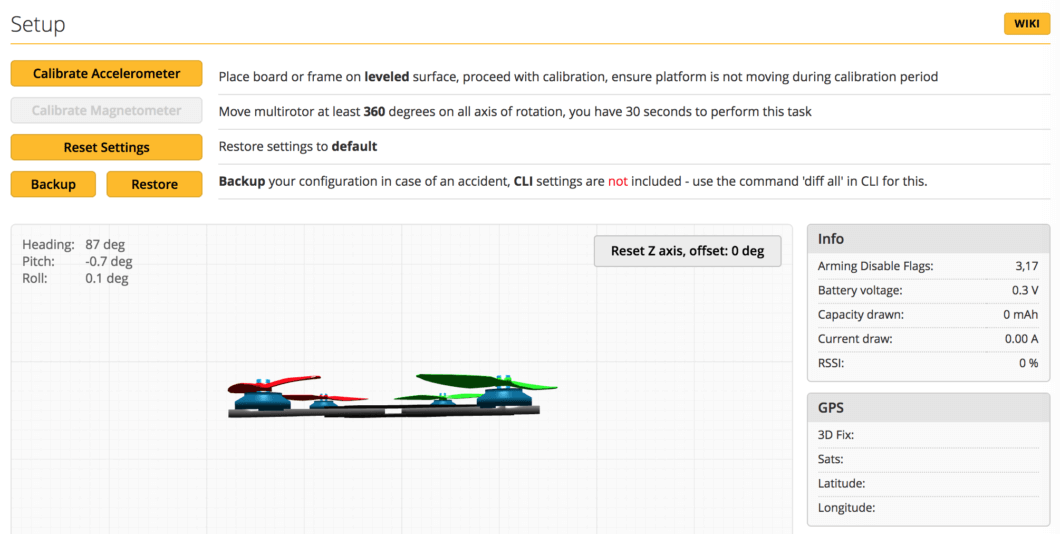
In betaflight's setup tab, you should understand that you can calibrate the aircraft horizontally and reset the settings.
The main method of use is to perform a "horizontal calibration" with the drone body in a horizontal state when the level is not taken.In most cases, it is horizontal, so there is little opportunity to use them unless you create the quad yourself.
Port
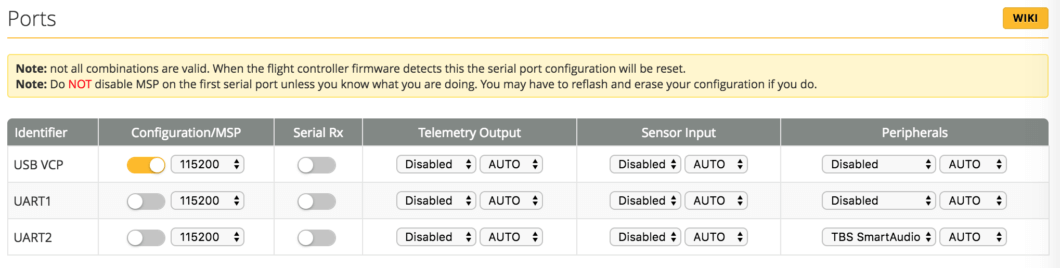
The Betaflight Port tab sets the communication port between the drone and the external connectivity device.
For example, the connection setting of VTX (video transmitter) and Receiver (receiver) is set.In addition, "USB VCP" is a necessary setting when connecting the drone and PC by USB, so please be careful not to turn off that item.
UART1, UART2, etc. mean the port of the flight controller, so check the manual of each product and configure the settings.
It is usually to configure the communication port of VTX, but remember that additional configuration is required when adding Receiver.In this case, we set "TBS Smartaudio" as a peripheral device for UART2.
Configuration
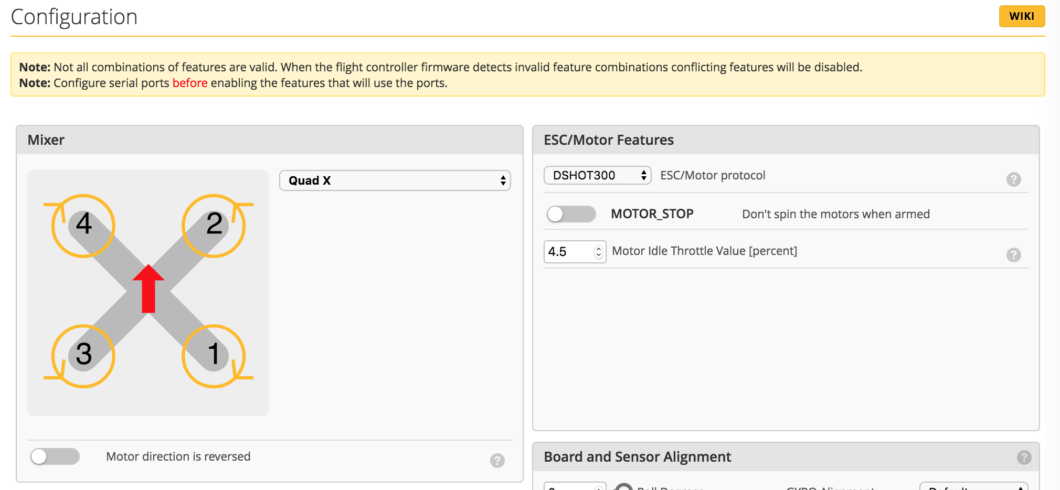
The following items can be set in the Configuration tab of Betaflight.
Items that say "No use" are items that do not need to be set if you purchased a ready-made drone.
The basic configurable contents are described below
-
- Mixer
- ESC/Motor function
- System settings
- FC Board & Sensor Alignment: "No use"
- Accelerometer trim: "No use"
- Arming
- Personalization
- Camera
- Receiver
- RSSI (signal strength): "No use"
- 3D ESC / Motor function: "No use"
- GPS: "No use"
- Other features
- Dshot beacon setting
- Beep settings
Explanation of only rudimentary items because there are a large number of items
- Mixer
You can change the direction of rotation of the drone's motor. - ESC/Motor function
Sets whether the propeller is turned when the drone is armed. - Arming
Set whether the drone is tiltable but can be armed. - Personalization
Set the aircraft name to the OSD (camera image). - Receiver
You configure the communication protocol with the transmitter, but in many cases you will choose FrskyD or FrskyX. - Dshot Beacon Configuration
Set whether to make a sound from the motor by instructing such as a transmitter. - Beeper Configuration
Set the rules for making sound from a motor or buzzer.
The setting method is different for each drone, but the details are described in the review article of each drone, so I will not spare it in this article.
Example of receiver configuration
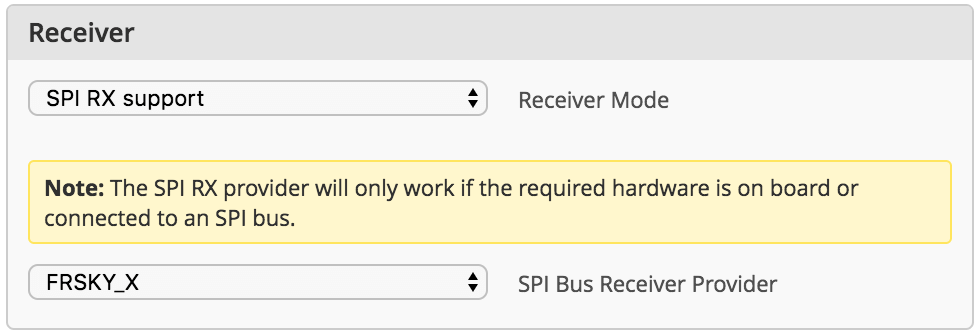
This is an example of the setting when using the internal receiver "Frsky".
- SPI RX support
- FRSKY_X
FrSKY has two protocols, so let's set it up if necessary.
Example of Arming Settings

Arming determines the angle at which the arm is possible even when the drone is tilted.
In order to make the arm possible, such as in the case of a crash, it is recommended to set the arm angle as 180.
Power/Battery
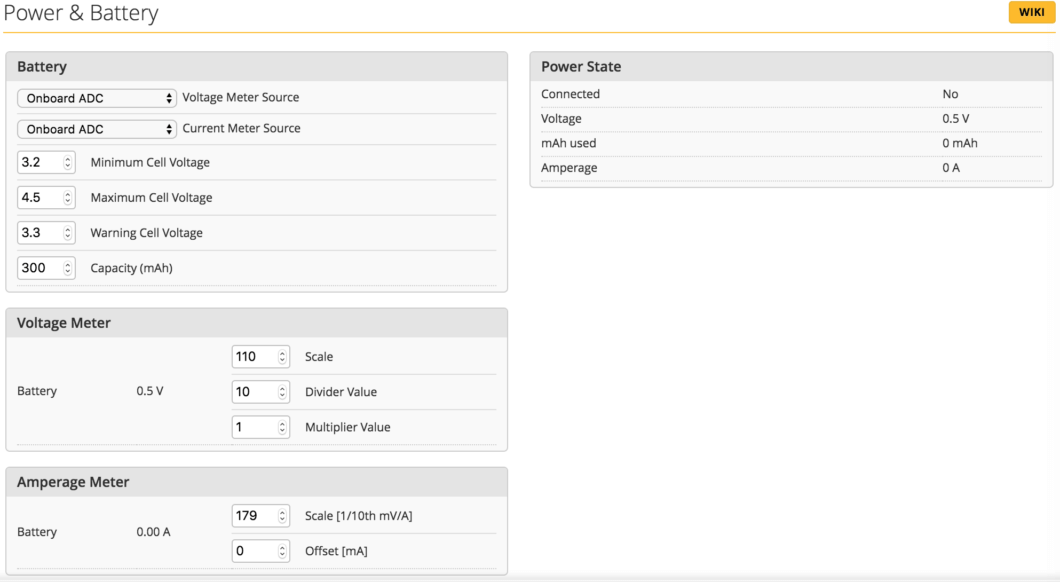
In Betaflight's Power and Battery tab, the voltage and current meter are set.
In many cases, the default settings are fine, but it's a good idea to hold down the following points.
- Minimum cell voltage
Usually about 3.2v in the item that determines the minimum available voltage of the battery - Maximum cell voltage
In the item to set the maximum voltage of the battery, set as follows
Lipo Battery: 4.2v
HV battery: 4.5v - Warning cell voltage
This item sets the voltage to display the alert on the OSD screen, etc.
Set a voltage about 0.1 to 0.2v higher than the minimum voltage per cell
PID tuning
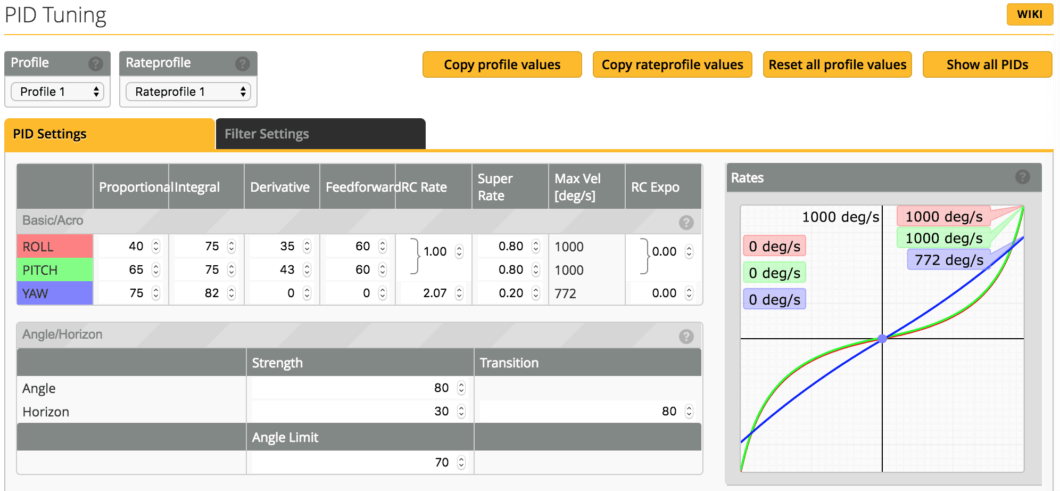
The Betaflight PID Tuning tab configures settings for PID control.
If you use a commercial drone, the default settings will be fine, but if you adjust the quad PID or build a quad, it will be an item that needs to be adjusted.
Because it is not possible to explain it in this place, the detailis are omitted.
Receiver
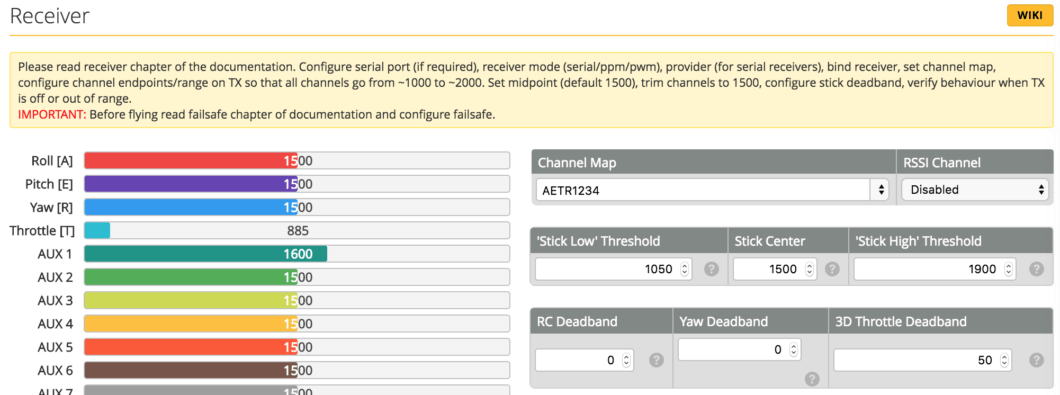
In betaflight's Receiver tab, this is an item that sets the instructions from the transmitter.
Since it is recommended that almost all settings be done on the transmitter side, we have set the channel map and RSSI channel here.
- Channel Map: AETR1234 (Changes depending on usage)
- RSSI channels: Set channels only when using external receivers
Since the RSSI channel is set different depending on the external receiver used, let's set it by referring to the website that posted the review article.
Mode
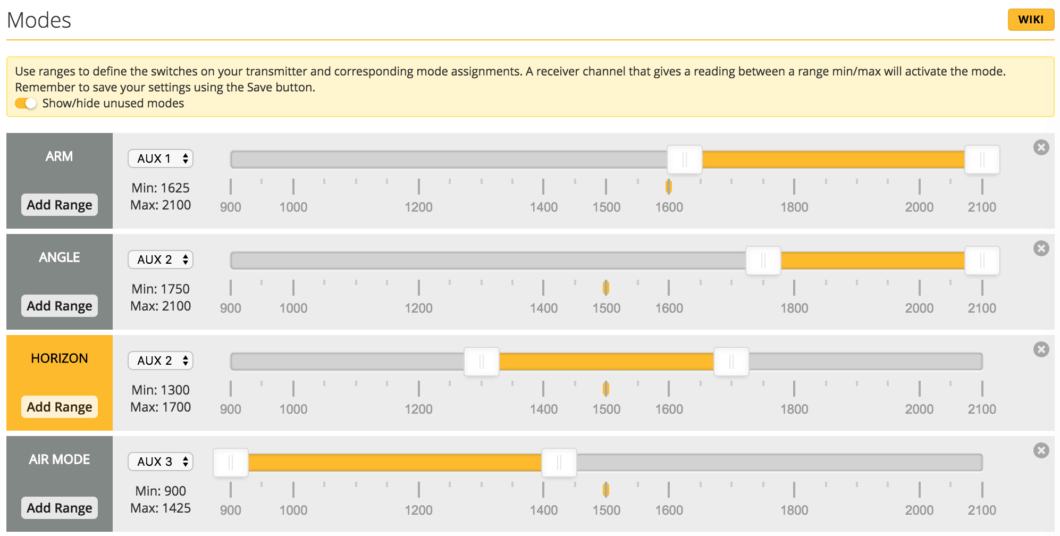
The Betaflight Mode tab sets control over the transmitter switch.
This is an item that needs to be set even for a commercially available quad. Use the website that contains the review articles as a reference.
Motor
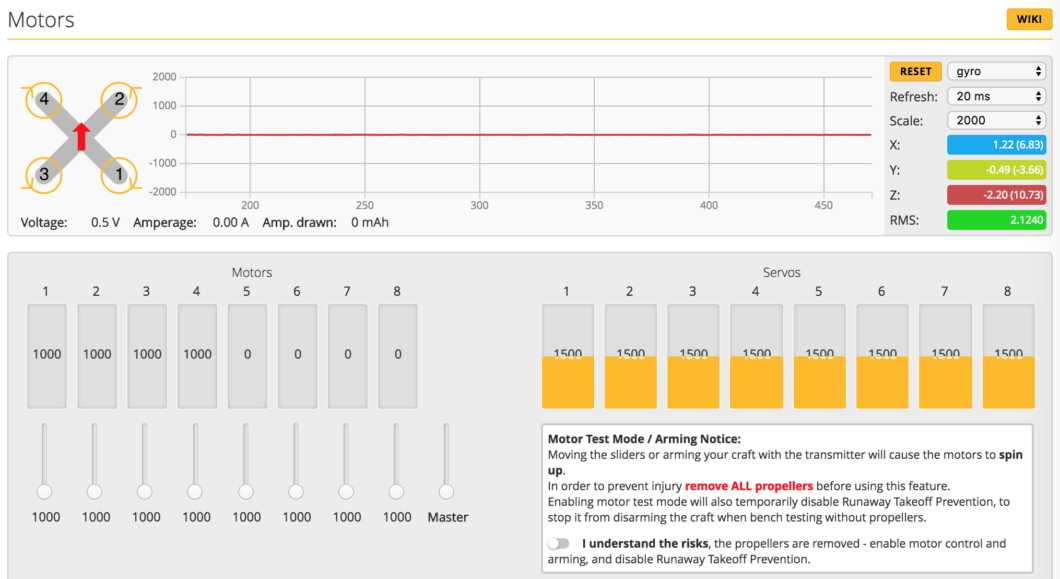
In betaflight's motor tab, it is possible to perform the rotation test of the motor.
Since there is no use in the initial stage, the explanation in this article is omitted, so please check it on the website according to your proficiency level.
OSD
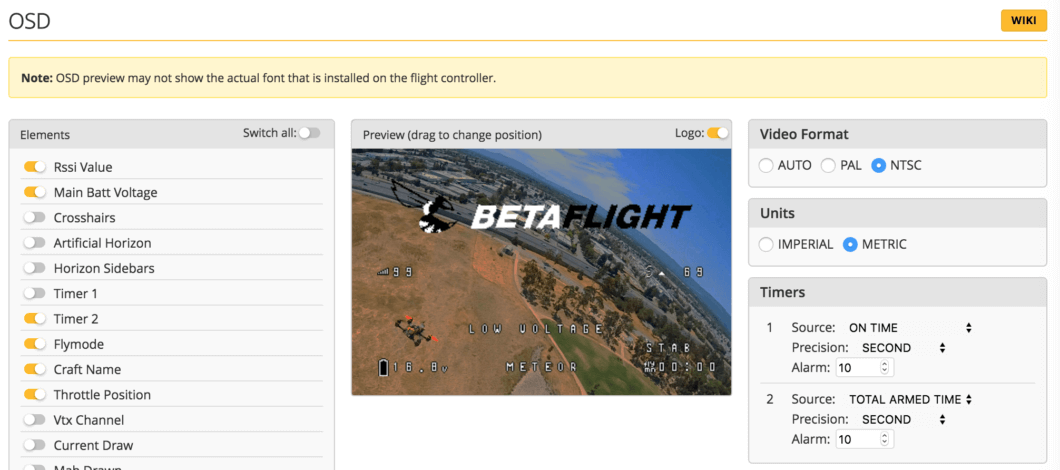
In Betaflight's OSD tab, we set the settings to output from VTX and display aircraft information on the camera image received by FPV goggles.
There is no rule on the setting, and the difference in the setting contents occurs depending on the preference of the drone pilot, but I will post the setting sample for reference.
- Rssi Value
- Main Batt Voltage
- Timer 2
- Flymode
- Craft Name
- Throttle Position
- Warnings
Black Box
I usually don't use it, so I'll spare it.
CIL command line
In Betaflight's CIL command line tab, it is possible to represent the previous settings as a string.
Here is an example of a command.
- Dump all: Displays all settings as a string
- Diff all: Displays the delta setting as a string
If you understand only the above two points, there will be no problem for the time being.
Summary
In this article, we have described the basic settings of "Betaflight".If you want to understand more detailed settings, you may want to check the website.
Also, the information on GitHub is very useful, so I recommend reading it when you have time.