
今回はマイクロドローンなどの設定に利用するbetaflight configurator(ベータフライト コンフィグレーター)のダウンロードから設定までの使い方を記事にしておきたいと思います。
バージョンによって使い方が多少異なる部分はありますが、考え方は同様となりますので本記事を参考にダウンロードから設定までを行って貰えればと思います。
【Betaflight設定マニュアル】ダウンロードから使い方の説明
BetaFlight(ベータフライト)とは?
Betaflightは、マルチローター機(いわゆるドローン)と固定翼機を飛行させるために使用されるフライトコントローラーソフトウェア(ファームウェア)です。飛行性能、最先端の機能追加、幅広いターゲットサポートに焦点を当てています。
Betaflightの他にはBaseflight、Cleanflight、Emuflightなどが存在していますが、現在はBetaflightが主流となっています。
Betaflightの公式サイトではより詳細な説明がありますので、興味がある方は一読して下さい。
Betaflightのダウンロード
Betaflightを利用する為にはソフトウェア(Betaflight Configurator)をダウンロードしてPCへインストールする必要があり、以下のサイト(GitHub)より最新版を入手可能です。
尚、記事を書いた時点ではドローンのフライトコントローラーにインストールされているファームウェアのバージョンにより利用するソフトウェアを変更する必要がある点に注意して下さい。
- Betaflight 4.0未満:Betaflight 10.4
- Betaflight 4.0以上:Betaflight 10.6以降
Betaflightのインストール
BetaflightのダウンロードからPCへのインストール方法については、以下の記事で説明していますので参考にして下さい。
-

-
Betaflightのダウンロードからインストールと日本語化の説明
今回の記事では、ドローンの設定に必要となるフライトコントローラーBetaflight(ベータフライト)のインストールから日本語化までの使い方を記事にしておきたいと思います。 尚、Betaflightの ...
Read More

Betaflightの起動方法
PCへインストールしたアプリケーション(ソフトウェア)をダブルクリックして起動します。

PCとドローンをUSBケーブルで繋げ「接続」を選択します。これでドローンのフライトコントーローラーを設定出来る様になりました。
Betaflightの基本的な設定方法
BetaFlightにはいつくかの設定項目があります。各項目はバージョンアップが行われた場合でも基本的な構成には変化がない事が特徴的です。
本記事では各項目の特徴を説明します。
尚、本記事では「Betaflight10.4」をベースに記載します。
Betaflightの設定項目

Betaflightは合計で11項目なら成り立っています。尚、Expertモードではより細かな設定が可能である為に設定項目が増えますが、通常は利用しなくても問題はありません。
セットアップ
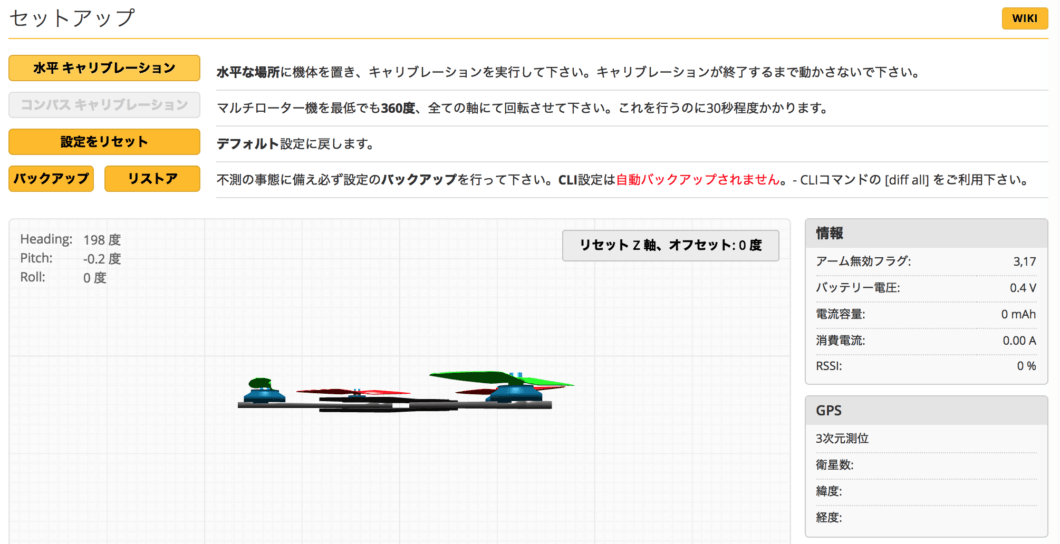
Betaflightのセットアップタブでは、機体の水平キャリブレーション(補正)と設定のリセットが行えると理解しておきましょう。
主な利用方法は水平が取れていない場合にドローン本体を水平状態にして「水平キャリブレーション」を実施します。ほとんどの場合は水平が取れていますので、ドローンを自作する場合を除き利用する機会は少ないでしょう。
ポート
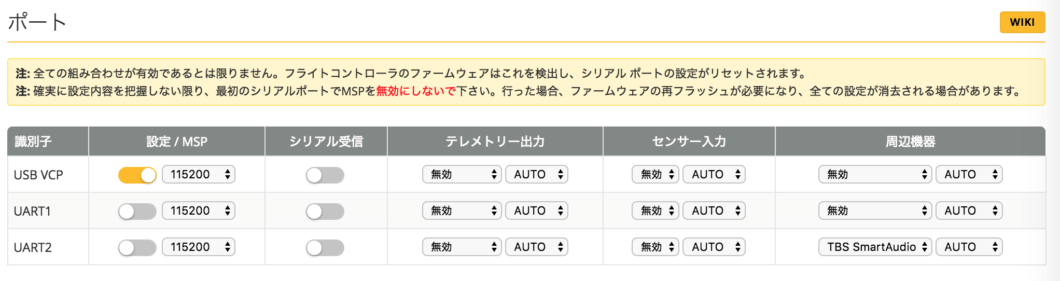
Betaflightのポートタブでは、ドローンと外部接続機器との通信ポートを設定します。
例としてはVTX(映像発信機)やReceiver(受信機)の接続設定を行います。尚、「USB VCP」はドローンとPCをUSBで接続する際に必要な設定となりますので、オフにしない様に注意して下さい。
UART1やUART2などはフライトコントローラーのポートを意味しますので、各製品のマニュアルを確認して設定を行います。
通常はVTXの通信ポートの設定を行う事となりますが、Receiverを増設した場合には追加の設定が必要となると覚えておきましょう。また、今回のケースではUART2に周辺機器として「TBS Smartaudio」を設定しました。
基本設定
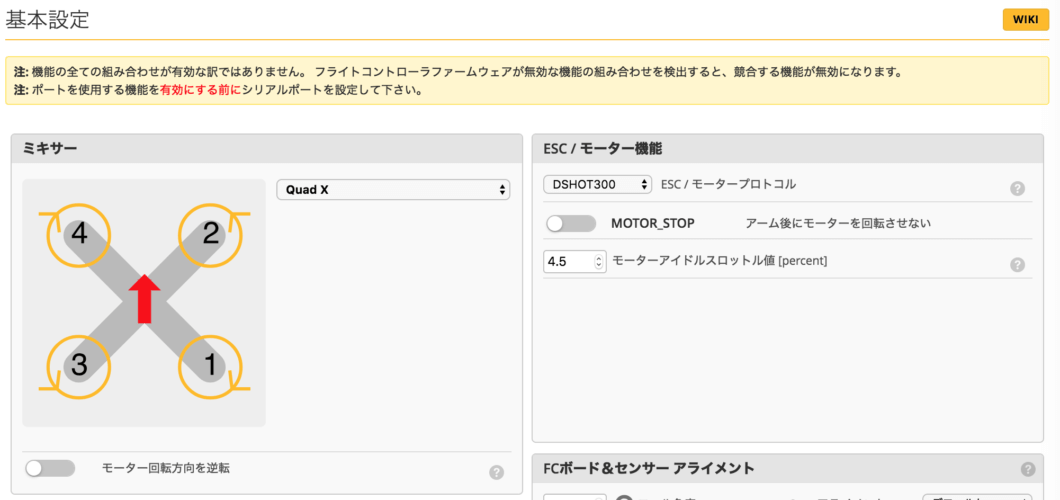
Betaflightの基本設定タブでは以下の項目の設定が可能です。「通常は利用しない」と記載した項目については既製品のドローンを購入した場合には、基本的には設定をする必要のない項目となります。
基本となる設定可能な内容を以下に記載
-
- ミキサー
- ESC/モーター機能
- システム設定
- FCボード&センサー アライメント:通常は利用しない
- 加速度センサートリム:通常は利用しない
- アーミング
- 個人用設定
- カメラ
- 受信機
- RSSI (信号強度):通常は利用しない
- 3D ESC / モーター機能:通常は利用しない
- GPS:通常は利用しない
- その他の機能
- Dshotビーコン設定
- ビープ音設定
項目数が多い為に初歩的な項目のみ説明
- ミキサー
ドローンのモーターの回転方向を変更できます。 - ESC/モーター機能
ドローンをアーム状態にした場合にプロペラを回すかどうかを設定します。 - アーミング
ドローンが傾いていてもアーム可能とするかを設定します。 - 個人用設定
OSD(カメラ映像)に機体名を設定します。 - 受信機
プロポとの通信プロトコルを設定しますが、多くの場合には、FrskyDやFrskyXを選択する事となります。 - Dshotビーコン設定
プロポなどの指示によりモーターから音を出すかを設定します。 - ビープ音 設定
モーターやブザーから音を出す場合のルールを設定します。
各ドローン毎に設定方法が異なりますが、詳細は各ドローンのレビュー記事に記載していますので、本記事では割愛します。
受信機の設定例
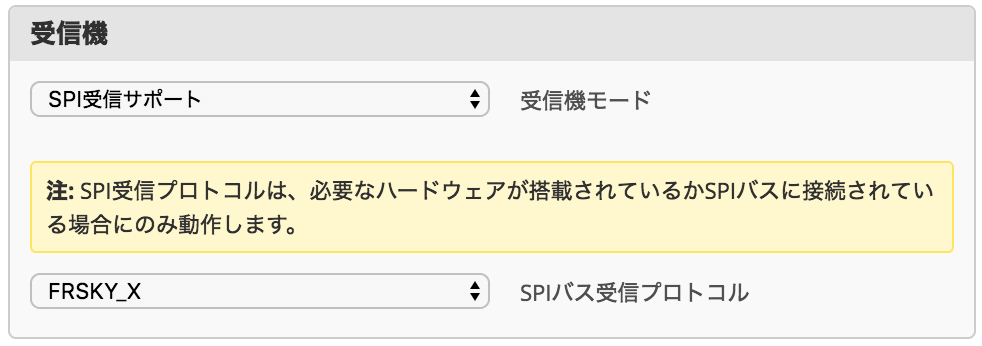
内部受信機「Frsky」を利用した際の設定例です。
- SPI受信サポート
- FRSKY_X
尚、FRSKYには2つのプロトコルがありますので、必要に応じて設定しましょう。
アーミングの設定例

アーミングとはドローンが傾いている場合でもアームを可能とする角度を決定します。
墜落した場合などにもアーム可能とする為に、アーム最角は180として設定しておく事を推奨します。
電源・バッテリー
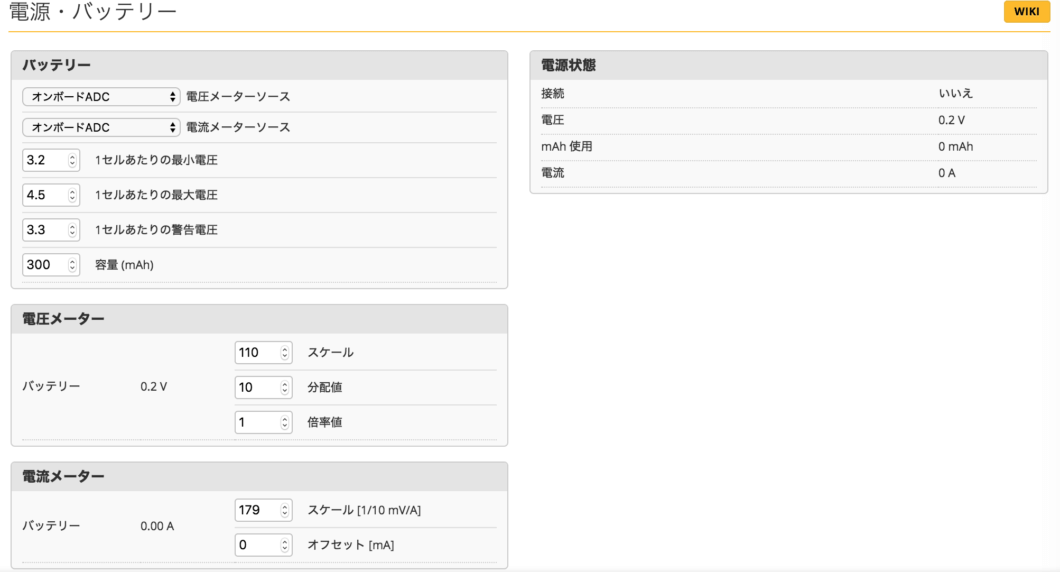
Betaflightの電源・バッテリータブでは電圧・電流メーターの設定を行います。
多くの場合デフォルト設定で問題ありませんが、以下のポイントを押さえておくと良いでしょう。
- 1セル辺りの最小電圧
バッテリーの利用可能な最低電圧を決定する項目で通常は3.2v程度 - 1セル辺りの最大電圧
バッテリーの最大電圧を設定する項目で、以下の様に設定
リポバッテリー:4.2v
HVバッテリー:4.5v - 1セル辺りの警告電圧
OSD画面などでアラートを表示する電圧を設定する項目です。
1セル辺りの最小電圧より0.1〜0.2v程度高い電圧を設定
-
-
Betaflightの電源・バッテリー設定|ドローンのOSDの電流値を補正する方法
今回はドローンのOSDで表示する電流値が異常(おかしい)な数値と示してしまっている場合での補正方法についての記事となります。 Betaflightのファームを変更した際にも発生しますが、ドローン(マイ ...
Read More
PIDチューニング
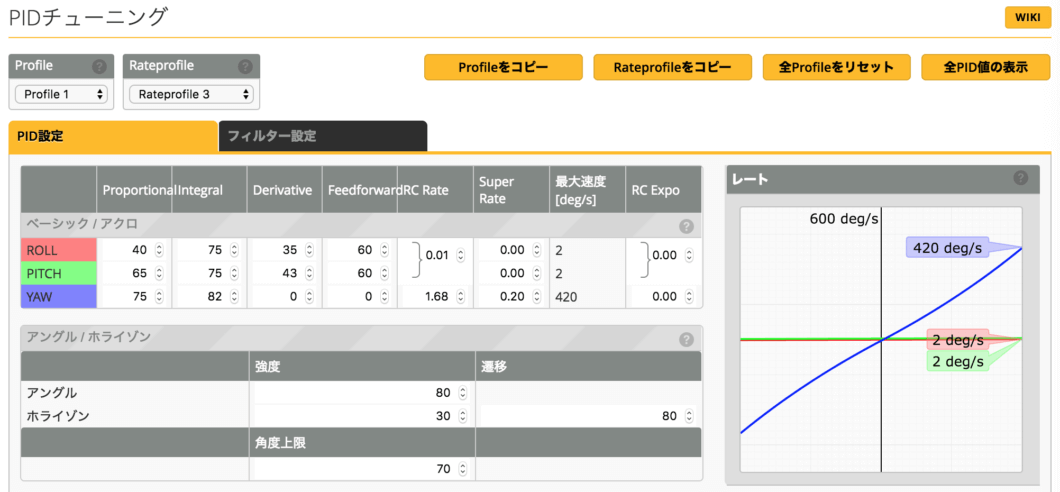
BetaflightのPIDチューニングタブでは、PID制御に関しての設定を行います。
既製品のドローンを利用する場合にはデフォルト設定のままで問題ありませんが、調整を行う場合やドローンを自作で作成した場合には調整が必要な項目となります。
RPMフィルターの導入方法について記事にしましたので気になる方は以下の記事を参考にどうぞ
-
-
FPVドローンフィルター設定|RPMフィルターの導入方法
今回の記事ではFPVドローンのRPMフィルター導入方法についてです。 大きくPWMフィルターとRPMフィルターの2種類が存在し、ESC(モーターの回転数を制御している)がBlHeli_S対応(有料)か ...
Read More
その他の詳細はこの場では説明しきれない為に詳細は割愛します。
受信機
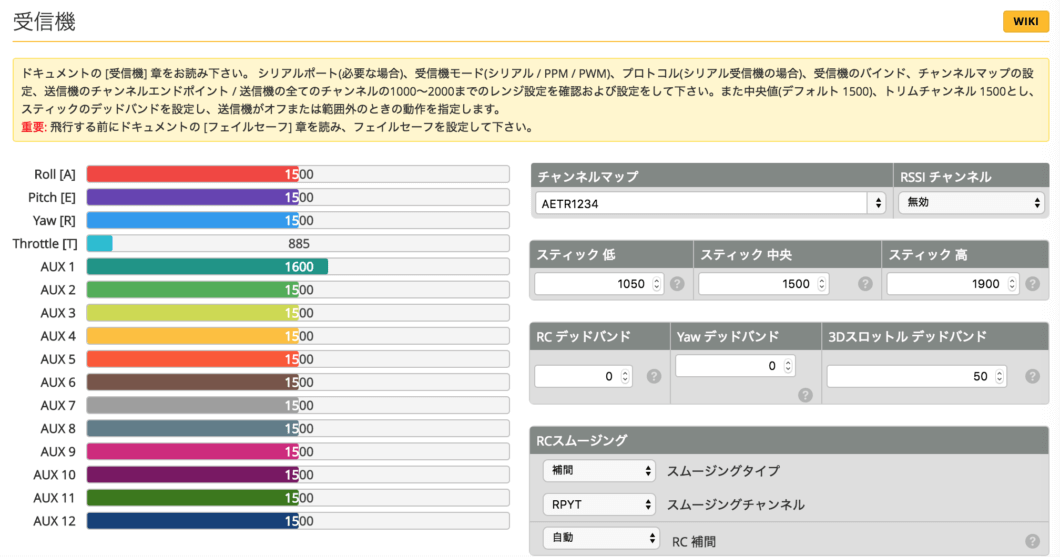
Betaflightの受信機タブでは、送信機(Transmitter)からの指示設定を行う項目です。
ほぼ全ての設定を送信機側で行う事を推奨しますので、ここではチャネルマップとRSSIチャンネルを設定しておきます。
- チャンネルマップ:ARTR1234(利用状況により変更)
- RSSIチャンネル:外部受信機を利用する場合のみチャンネルを設定
RSSIチャンネルは利用する外部受信機により設定するチャンネルが異なりますので、レビュー記事を掲載しているウェブサイトを参考に設定しましょう。
モード
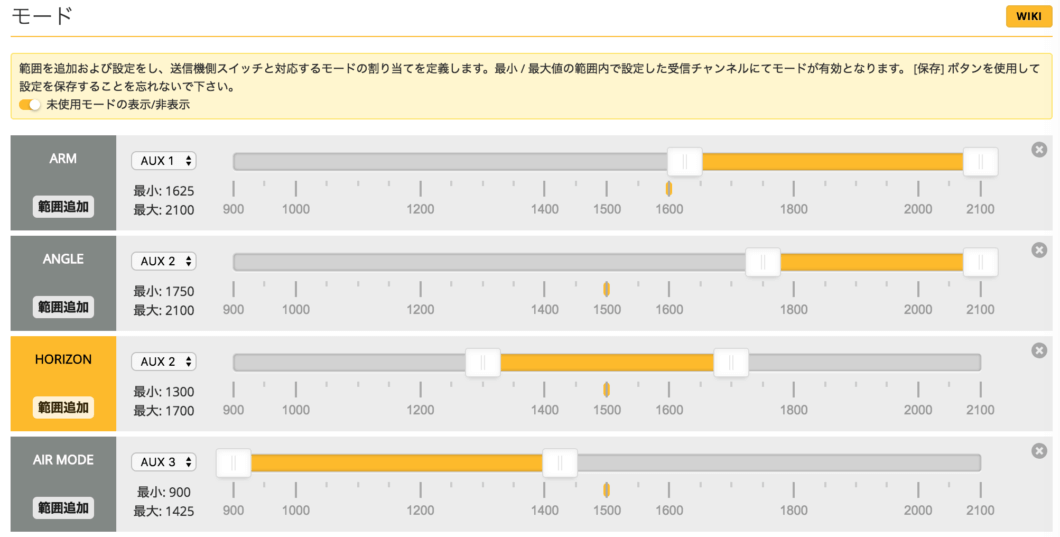
Betaflightのモードタブでは、送信機のスイッチに対する制御を設定します。
既製品のドローンの場合でも変更が必要な項目ですが、レビュー記事を掲載しているウェブサイトを参考に設定しましょう。
尚、以下の記事ではフライトモードについて詳細を書きましたので参考にして下さい。
-
-
Betaflightモード設定|ドローンのフライトモードの違いを説明
今回の記事ではBetalightで設定するドローン(マイクロドローン)のフライトモードの違いについての説明となります。 Betalightのフライトモードでは「Angle(アングル)」「Horizon ...
Read More
モーター
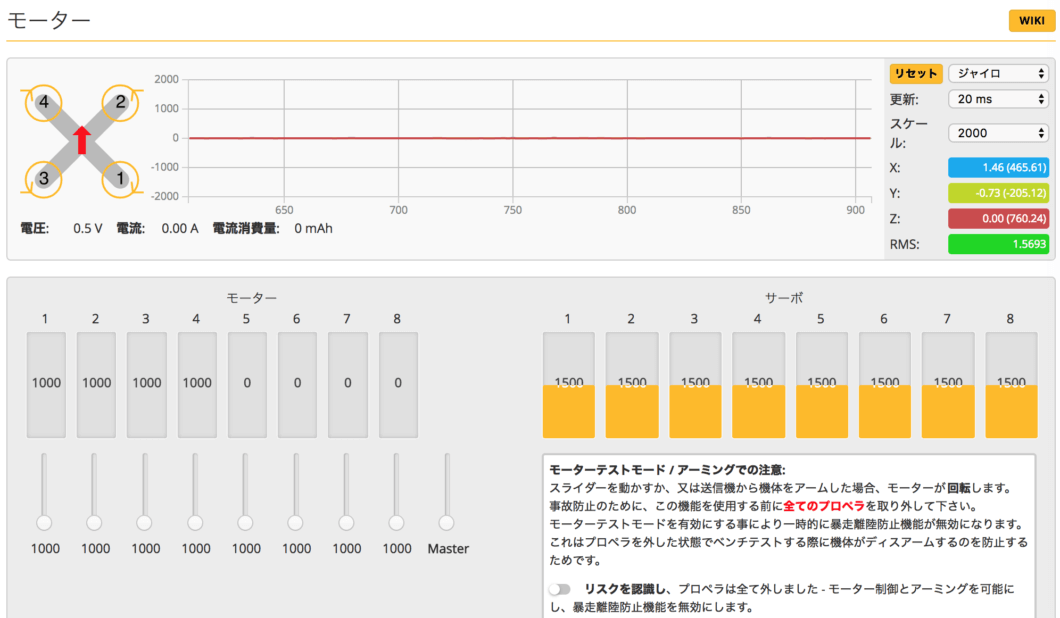
Betaflightのモータータブでは、モーターの回転テストを行う事が可能です。
初期段階では利用する事はありませんので本記事での説明は割愛しますので、皆さんの習熟度に応じてウェブサイトなどで調べて下さい。
OSD
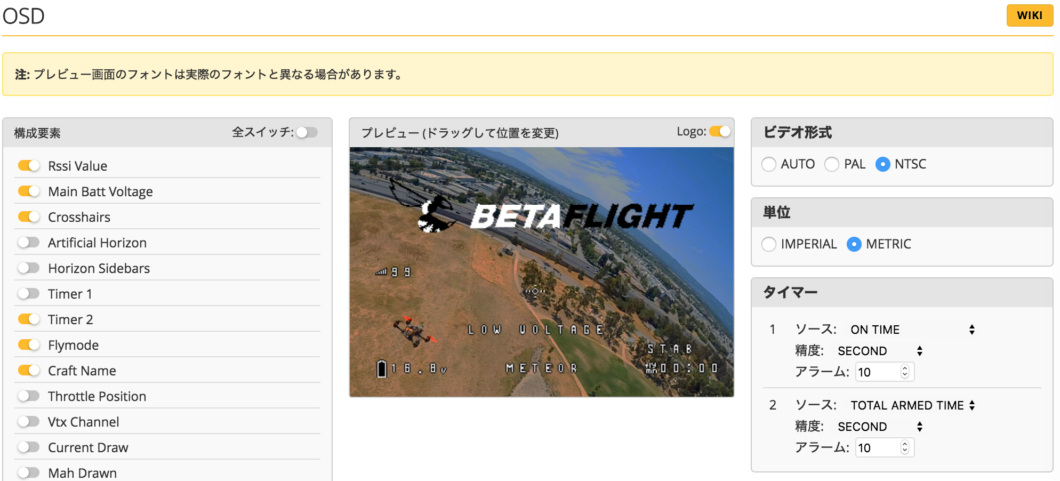
BetaflightのOSDタブでは、VTXから出力しFPVゴーグルなどで受信したカメラ映像に機体情報を表示する為の設定を行います。
設定に決まりはなくドローンパイロットの好みによって設定内容に差が発生しますが、参考用に設定サンプルを掲載しておきます。以下、設定例です。
- Rssi Value
- Main Batt Voltage
- Timer 2
- Flymode
- Craft Name
- Throttle Position
- Warnings
ブラックボックス
通常は利用しない為に割愛します。
CILコマンドライン
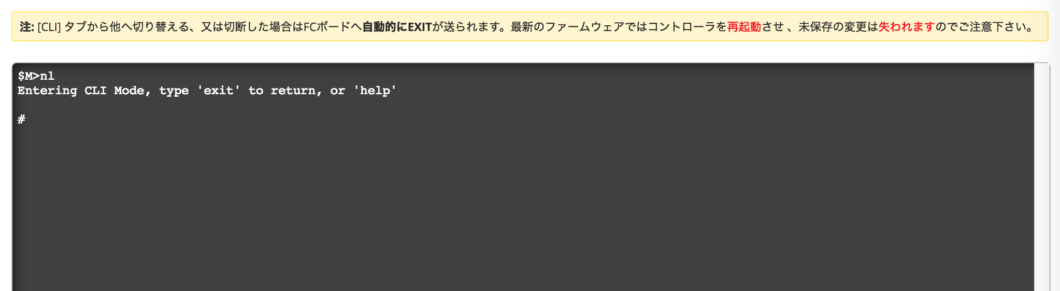
BetaflightのCILコマンドラインタブでは、今までの設定内容を文字列として表現する事が可能な項目です。
以下、コマンド例を掲載しておきます。
- Dump all:全ての設定値を文字列として表示
- Diff all:差分の設定値を文字列として表示
上記2点のみを理解しておけば当面は問題ないでしょう。
Betaflightの補足説明
Betaflightには補足説明がありますので、その内容を参考とする事で理解を深めたり参考にする事が可能です。
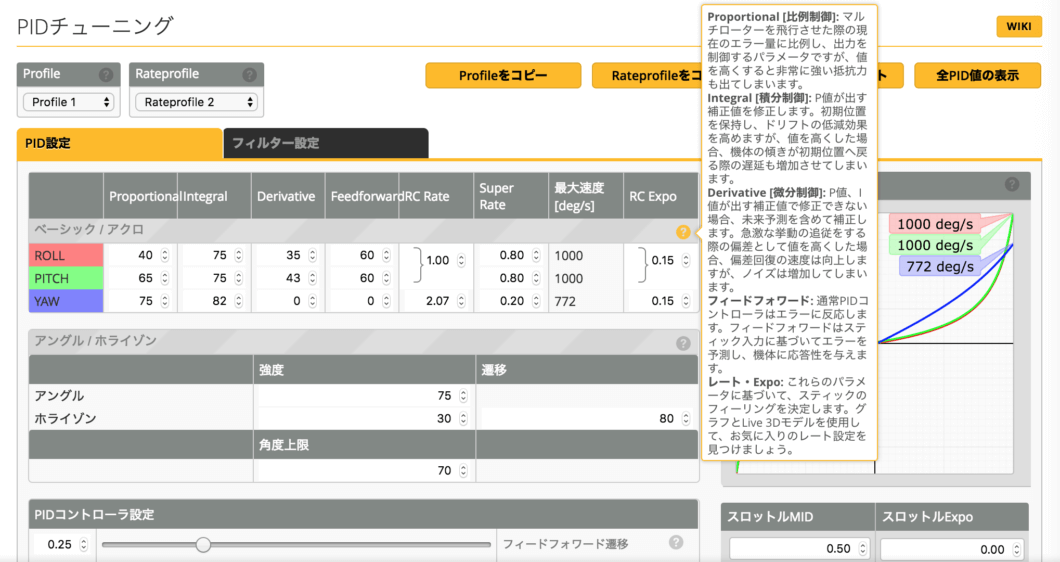
1つの例となりますが、BetaFlightのPIDチューニングの画面で「?」にカーソルを合わせると補足説明を見る事が可能です。
まとめ
本記事では「Betaflight」の基本的な設定内容の説明を記載しました。より詳細な設定内容を理解したい方は、ウェブサイトなどで調べてみると良いでしょう。
また、英語表記ではありますがGitHubの情報はとても参考になりますので、時間がある際に一読しておく事を推奨します。